仕様
- 動作電圧:3.3 ~ 6 V
- 動作速度:0.12 秒 / 60 度
- 回転範囲:約 -90 ~ 90 度
- 温度範囲:0 ºC – 55 ºC
回路接続
| SG-90 | Raspberry Pi Pico |
|---|---|
| オレンジ色線 | GP0 (コードによって) |
| 赤い色線 | VBUS(5V) |
| 茶色線 | GND |
PWM制御
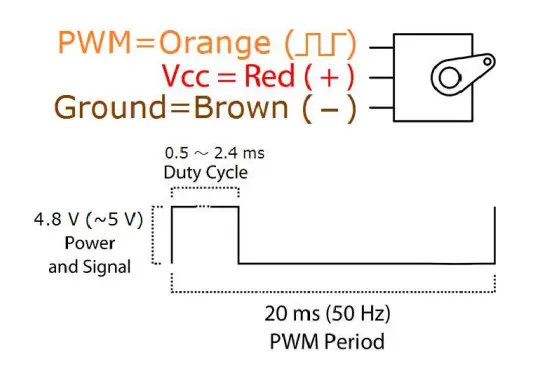
| 角度 | パルス幅 | デューティー比(パルス幅 / 周期) |
|---|---|---|
| -90°(左) | 0.5ms | 0.5ms / 20ms |
| 0°(中央) | 1.45ms | 1.45ms / 20ms |
| 90°(右) | 2.4ms | 2.4ms / 20ms |
コード
|
|
パラメータ
duty_max
最大のデューティ値(100%)である。
最大値 65025 についてこちらを参考してください。
deg_min
-90° ときのデューティー比である。
deg_middle
0° ときのデューティー比である。
deg_max
90° ときのデューティー比である。
関数
init(pin_pwm = 0, freq = 50)
ピンと周波数を配置するための初期化関数である。
- pin_pwm:PWM 信号線と繋がっているのピンである。
- freq:周波数、ここにはデータシートによって 50Hz に設定する。
example(interval = 3)
テスト関数である。-90° -> 0° -> 90° の間にループ制御する。
- interval:回転間隔。